Overview
We present a motivational system for an agent undergoing
reinforcement learning (RL), which enables it to balance
multiple drives, each of which is satiated by different types of
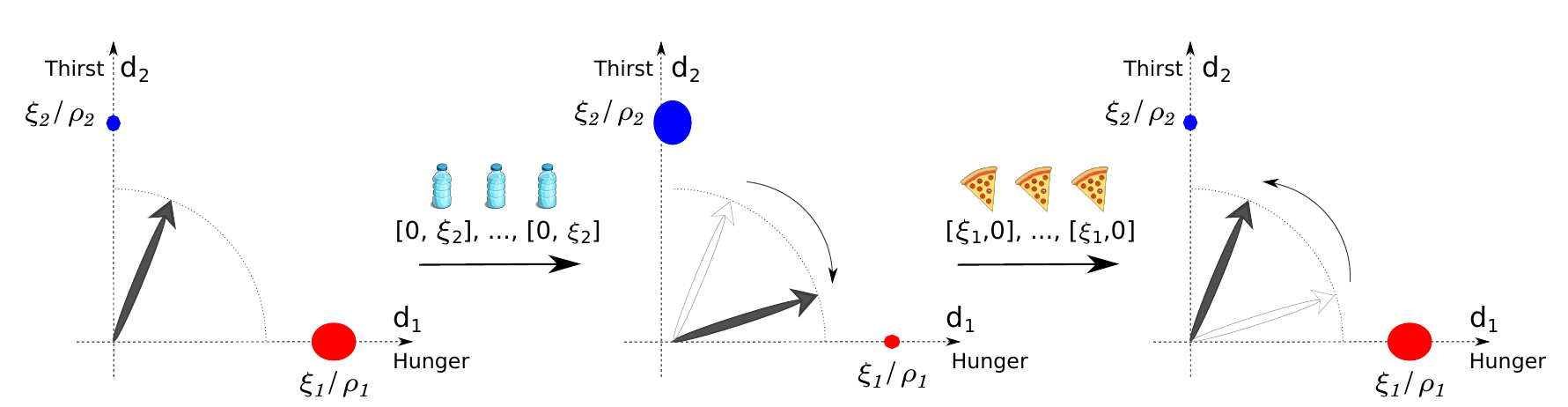
stimuli. Inspired by drive reduction theory, it uses
Minor Component Analysis (MCA) to model the agent's internal drive
state, and modulates incoming stimuli on the basis of how
strongly the stimulus satiates the currently active
drive. The agent's dynamic policy continually changes through
least-squares temporal difference updates. It automatically seeks
stimuli that first satiate the most active internal drives, then the
next most active drives, etc. We prove that our algorithm is stable
under certain conditions. Experimental results illustrate its
behavior.
Videos
Top
->
Software
Python (soon)